Contexte
Depuis plusieurs décennies, la biodiversité connaît un déclin sans précédent en raison des activités anthropiques (Leclère et al., 2020). Les changements d’occupation des sols représentent la plus grande menace, actuellement identifiée, pour les organismes vivants (Maxwell et al., 2016). En effet, la surexploitation des ressources, la déforestation notamment, les activités agricoles et l’urbanisation ainsi générées sont particulièrement destructrices pour les espèces et leurs habitats. Ces activités entraînent une fragmentation des paysages qui se traduit par une perte des habitats, ou une altération de leur qualité, et par leur isolement (Fahrig, 2003 ; Fahrig et al., 2011). Les taches d’habitats1 restants jouent alors un rôle de refuge pour les organismes et arborent généralement une riche biodiversité : ce sont des réservoirs de biodiversité. Néanmoins, l’isolement géographique des habitats et des populations associées conduit souvent à la réduction des tailles des populations, à une augmentation de la consanguinité et à un risque grandissant de vortex d’extinction2 (Frankham, 2015 ; Keyghobadi, 2007). Ainsi, la pérennité et la résilience de la biodiversité deviennent dépendantes du degré d’isolement géographique des taches sur lesquelles elle se trouve, c’est-à-dire de la connectivité de chaque tache avec les autres taches d’habitat avoisinantes.
L’artificialisation des sols est associée aux surfaces imperméabilisées qui intègrent à la fois les surfaces bâties, les routes et les parkings. Ces types de surface sont des zones inertes du point de vue de la biodiversité. En effet, cette dernière se retrouve à l’intérieur des îlots de végétation en milieu urbain. La persistance de ces espaces verts, habitats pour la biodiversité urbaine, dépend alors de la consommation et de l’utilisation de ces surfaces. Ils représentent malgré eux un enjeu de biodiversité important alors même qu’ils ne sont pas considérés en tant qu’espaces naturels, agricoles et forestiers (ENAF). Plusieurs questions se posent : comment considérer ces espaces verts (artificialisés ou non ?), et comment les gérer ? S’ils constituent des habitats pour la biodiversité, ils fournissent également des services écosystémiques non négligeables à prendre en compte en milieu urbain. À titre d’exemple, les espaces verts et les points d’eau sont des éléments qui créent des îlots de fraîcheur urbains en période de canicule ou durant les pics de chaleur. La pérennité de ces écosystèmes urbains repose alors sur la distribution de la végétation urbaine et de ses différentes strates qui vont déterminer la fonctionnalité des réseaux écologiques. Ces réseaux sont constitués d’habitats, appelés aussi réservoirs de biodiversité, et de corridors écologiques, c’est-à-dire les couloirs de migrations ou les connexions fonctionnelles entre ces habitats. Les changements paysagers, tels que l’artificialisation des sols, ont eu tendance à fragmenter ces habitats, menaçant ainsi leur biodiversité associée. C’est dans ce cadre que la trame verte et bleue (TVB) a été adoptée afin d’enrayer la perte de biodiversité en identifiant et recréant un réseau écologique national cohérent. Ces réseaux écologiques sont généralement étudiés par des outils et des méthodes cartographiques afin d’identifier les réservoirs de biodiversité et leurs corridors écologiques. Ainsi, les strates de végétation urbaines doivent être identifiées de manière précise au sein de cartographies d’occupation ou d’utilisation des sols. Ces dernières constituent la donnée d’entrée pour quantifier les surfaces occupées par la végétation urbaine, les ENAF ou les surfaces artificialisées, mais aussi pour analyser les réseaux écologiques.
Il existe aujourd’hui de nombreuses bases de données institutionnelles en accès libre qui décrivent, à différentes résolutions spatiales et spectrales, l’occupation des sols. Par exemple, la compilation de certaines bases de données – et notamment la BD Topo de l’Institut national de l’information géographique et forestière (IGN), le registre parcellaire graphique (RPG) et le produit OSO du Centre d’expertise scientifique sur l’occupation des sols (CES OSO, carte issue du Centre d’études spatiales de la biosphère, Cesbio) – permet de créer une représentation fiable de l’occupation du sol du territoire. Cela offre même la possibilité d’en saisir certaines subtilités telles que la présence de tronçons routiers souterrains ou surélevés, les réseaux de haies ou encore les différents types de route (autoroutes, nationales, chemins de terre…). Néanmoins, ces données présentent certaines limites dans des milieux dont la composition paysagère est trop hétérogène et complexe. En milieu urbain notamment, alors que la végétation urbaine abrite la majorité de la biodiversité présente, elle est souvent sous-représentée dans les bases de données disponibles dont la résolution spatiale ne permet pas de déceler certaines zones de végétation isolées en ville (Puissant et al., 2014 ; Shahtahmassebi et al., 2021). Par ailleurs, une fois la végétation en milieu urbain identifiée, il est important de prendre en compte ses principales strates puisqu’elles jouent des rôles écologiques différents pour les organismes vivants.
Ainsi, dans un contexte d’urbanisation croissante et face à l’objectif de zéro artificialisation nette (ZAN), la compréhension de la manière dont les structures du paysage ont affecté et affectent la biodiversité est un enjeu majeur en écologie urbaine pour la conservation de la biodiversité (LaPoint et al., 2015 ; Wellmann et al., 2020). En aménagement urbain, il est nécessaire de développer des diagnostics écologiques rapides en utilisant par exemple l’écologie du paysage3, qui permet d’estimer la qualité des réseaux écologiques et leur opérationnalité (Foltête et al., 2014). Néanmoins, ces résultats cartographiques dépendent du niveau de précision de la cartographie sur lesquelles elles s’appuient. Ainsi, l’utilisation d’images à très haute résolution spatiale et spectrale combinée aux méthodes et outils de télédétection devient de plus en plus incontournable pour étudier non seulement l’occupation des sols à l’intérieur des villes (la végétation urbaine, entre autres) mais également son impact sur les processus écologiques tels que les services écosystémiques ou encore les réseaux écologiques (App et al., 2022 ; Neyns & Canters, 2022 ; Shahtahmassebi et al., 2021 ; Wellmann et al., 2020). À partir de données en libre accès et de projets open source (Quantum GIS Development Team, 2019) et Orfeo ToolBox (OTB ; Grizonnet et al., 2017), nous avons développé une méthodologie combinant télédétection et écologie du paysage afin de décrire l’occupation du sol à très haute résolution spatiale et d’en modéliser des réseaux écologiques précis destinés à orienter l’aménagement du territoire. Cette approche permet de détecter et de caractériser les différentes strates de végétation en contexte urbain et d’estimer son apport dans la description et la compréhension des processus écologiques. Les travaux présentés ici sont en grande partie dérivés de Morin et al. (2022)4.
Caractériser la végétation urbaine via la télédétection et l’intelligence artificielle
Dans le but de prendre en compte, de manière précise, les continuités écologiques à travers le milieu urbain, nous avons identifié la végétation herbacée et arborée ; cela permet de considérer les rôles écologiques différents que chacune de ces strates joue pour les organismes vivants. N’ayant pas de données LiDAR à disposition, c’est-à-dire des données permettant d’identifier la hauteur des objets à la surface du sol, nous avons utilisé une approche Geographic Object-Based Image Analysis5 (GEOBIA) implémentée dans OTB (Grizonnet et al., 2017) et appelée « classification orientée objet ». Il est à noter que cette approche est basée sur l’intelligence artificielle, ici sur du machine learning, qui intègre notamment une étape d’apprentissage (Blaschke et al., 2014 ; Chen et al., 2018). Les villes de Poitiers (86), Niort (79) et Châtellerault (86) ont été choisies comme zones d’étude pour tester et valider cette méthodologie à partir d’une image mono-temporelle et multispectrale, la BD Ortho de l’IGN en « fausses couleurs ». Cette image, d’une résolution spatiale de 0,5 m, comporte les canaux proche infrarouge, rouge, vert. Les images ont été prises en octobre 2017 pour Poitiers et Châtellerault et en mai 2018 pour Niort.
D’un point de vue analytique et technique, la classification orientée objet sur laquelle repose notre processus de télédétection contient quatre principales étapes :
-
un prétraitement des données : calcul du Normalized Difference Vegetation Index (NDVI), calcul de quatre textures de Haralick (Energy, Entropy, Contrast, Correlation) avec un rayon de 7 x 7 pixels obtenus à partir de la luminance (voir l’encadré ci-dessous) ;
-
la segmentation, étape qui consiste à détourer et à créer des groupes de pixels spatialement proches et ayant des caractéristiques similaires ;
-
la classification, qui intègre l’étape d’apprentissage via l’utilisation de l’algorithme dit du Random Forest. Trois catégories sont ciblées : la végétation arborée, la végétation herbacée et les surfaces artificialisées. Des échantillons (polygones) d’apprentissage caractérisant chaque catégorie sont créés puis utilisés pour réaliser cinq classifications qui sont ensuite fusionnées pour limiter les erreurs de classification (processus de validation croisée ; Dupuy et al., 2020) ;
-
l’évaluation de la classification, qui permet d’estimer les performances de détection de la classification globale et de chaque catégorie paysagère (sous-détection ou sur-détection).
Normalized Difference Vegetation Index (NDVI), texture et luminance
Le Normalized Difference Vegetation Index (NDVI) est un indice de végétation très utilisé en télédétection qui se base sur les longueurs d’onde dans le proche infrarouge et rouge et permet d’identifier les surfaces végétalisées. Contrairement aux surfaces imperméabilisées ou en eau, la végétation réfléchit fortement les longueurs d’onde dans le proche infrarouge.
Les textures caractérisent l’aspect lisse ou rugueux des éléments d’une image. L’hétérogénéité des valeurs des pixels, dans un rayon donné, est quantifiée et décrit dans quelle mesure la surface est « lisse » ou « rugueuse ». Les surfaces herbacées montrent généralement des valeurs de pixel similaires – soit un aspect plutôt lisse – alors que les surfaces arborées montrent des valeurs de pixel plus hétérogènes – soit un aspect plus rugueux.
La luminance est la moyenne entre les bandes spectrales utilisées, ici le proche infrarouge, le rouge et le vert.
Figure 1. Cartographie des trois villes étudiées : Châtellerault, Niort et Poitiers
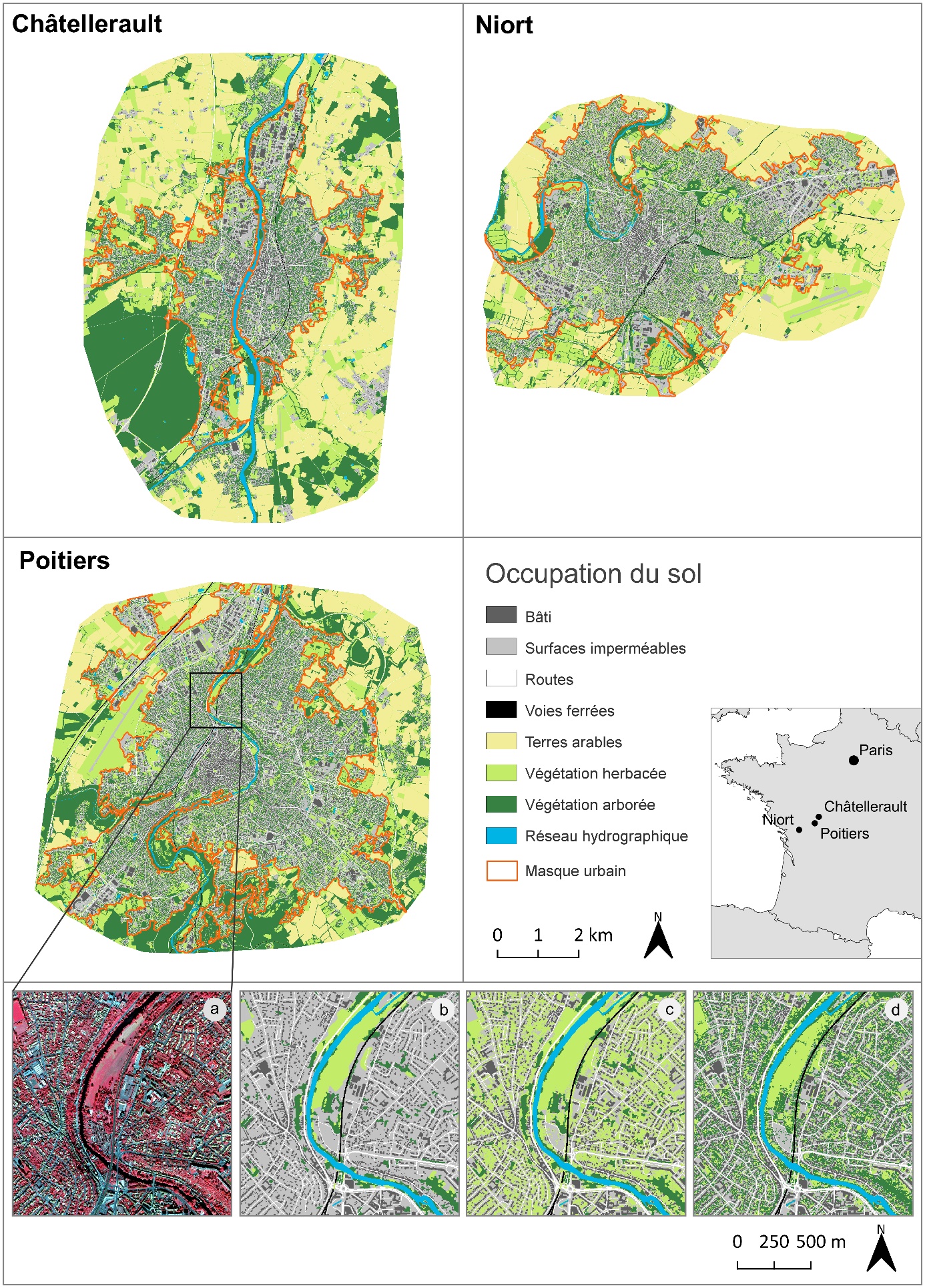
(a) : zoom sur la zone d’étude de Poitiers en image fausses couleurs (RVB = Pir/R/V ; BD Ortho IRC de l’IGN). Trois niveaux de précision ont été obtenus : une cartographie brute (b), une cartographie enrichie de la végétation globale télédéctée (c), une cartographie enrichie de la végétation herbacée et arborée télédétectée (d).
Adapté de Morin, Herrault, Guinard, Grandjean & Bech, 2022.
Licence CC BY 4.0.
Une classification orientée objet efficace pour identifier la végétation urbaine
Cartographier la végétation urbaine et ses strates représente un défi important pour considérer l’artificialisation des sols et la biodiversité urbaine. Cependant, l’approche orientée objet développée ici montre globalement de bons résultats dans la caractérisation de la végétation herbacée et arborée. À l’échelle de chaque ville, les classifications indiquent une précision globale (Overall Accuracy, OA) de 95,20 % (± 0,86), 96,72 % (± 4,61) et 98,10 % (± 1,26) et un indice Kappa6 de 0.90 (± 0,04), 0.94 (± 0,8) et 0.95 (± 0,01) pour Poitiers, Niort et Châtellerault respectivement. Ces performances se retrouvent également dans les métriques des catégories où la précision, le rappel et le F-Score7 sont élevés. Grâce au proche infrarouge et au faible nombre de catégories (ici trois catégories ciblées), les surfaces artificielles sont bien identifiées et différenciées de la végétation urbaine (figure 2).
Figure 2. Évaluation des performances des modèles pour chacune des trois catégories via la précision, le rappel et le F-Score
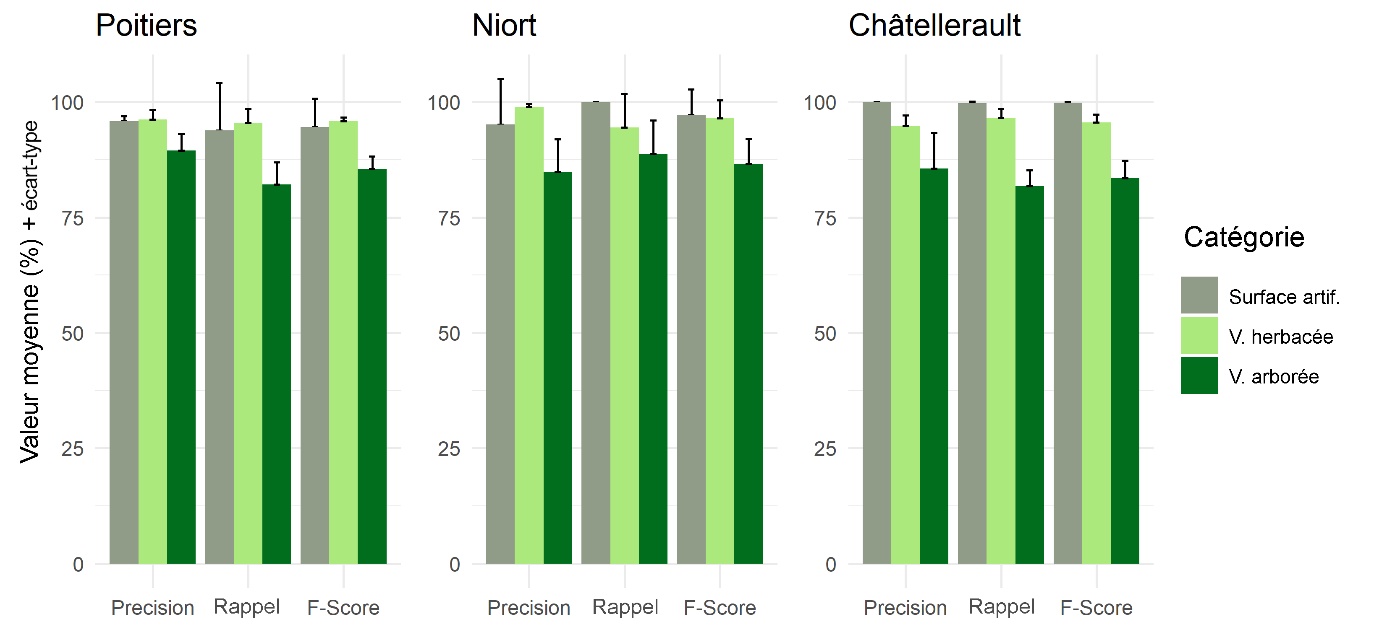
Adapté de Morin, Herrault, Guinard, Grandjean & Bech, 2022.
Licence CC BY 4.0.
Concernant les végétations herbacée et arborée, elles montrent de bonnes performances mais légèrement plus faibles, ce qui suggère quelques confusions entre ces deux catégories. À titre d’exemple, les petits buissons représentent des éléments peu aisés à classer entre les deux strates. D’ailleurs, la différenciation de ces deux strates peut difficilement reposer sur les longueurs spectrales, et c’est la raison pour laquelle nous avons intégré les textures, qui sont plus rugueuses pour la végétation arborée et plus lisses pour la végétation herbacée (Dorigo et al., 2012 ; Feng et al., 2015 ; Neyns & Canters, 2022). Il est important de noter que l’heure et la date de prise de vue de l’image influencent le résultat de la classification (De Luca et al., 2019 ; Wulder et al., 2008). En effet, les images prises en octobre pour Poitiers montrent des ombres portées plus grandes par rapport aux images de Niort prises en mai. De la même manière, cela exerce une influence sur la phénologie8 de la végétation. La résolution spatiale de l’image et la méthodologie utilisée ont toutefois permis d’identifier avec précision la présence des pelouses et des arbres isolés en milieu urbain.
Création des cartographies comparatives d’occupation du sol
Dans un premier temps, nous avons construit une cartographie de l’occupation du sol à partir de la compilation des données institutionnelles disponibles. Plus précisément, cette cartographie dite « brute » (Raw, figure 1. b.) a été obtenue en compilant : la BD Topo (IGN) qui détaille le bâti, les infrastructures routières et ferroviaires, la végétation arborée et le réseau hydrographique ; le RPG, qui délimite les parcelles agricoles ; et l’OSO du Cesbio, qui décrit l’emprise urbaine et la végétation herbacée. Afin d’identifier la nature de chaque culture sur plusieurs années, les cartes OSO de 2016, 2017, 2018 et 2019 ont été compilées pour identifier à l’intérieur de chaque parcelle agricole (délimitée par le RPG) les cultures annuelles (au moins trois années sur les quatre), les prairies temporaires (au moins deux années), les prairies permanentes (quatre années) et les vignes. Cependant, comme évoqué précédemment, ce travail de compilation, bien que déjà bien avancé, ne décrit pas précisément la distribution spatiale de la végétation en ville.
Dans un deuxième temps, nous avons combiné la cartographie « brute » avec la distribution de la végétation détectée via la télédétection et l’étape d’intelligence artificielle mais sans distinction de strates. Nous avons appelé cette cartographie “Very High Resolution vegetation map” (VHRvm, figure 1. c.). Cette végétation globale se rapproche sensiblement d’un masque NDVI seuillé identifiant les surfaces végétalisées.
Enfin, nous avons créé une troisième cartographie qui correspond à la cartographie VHRvm mais avec la distinction des strates arborée et herbacée issues de notre approche de classification. Cette cartographie enrichie a été appelée “Very High Resolution stratified vegetation map” (VHRsvm, figure 1. d.).
Construites pour chacune des trois villes, ces trois cartographies ont permis d’étudier l’importance de la précision de la cartographie dans l’estimation de la connectivité paysagère. La connectivité paysagère, définie par la mesure dans laquelle le paysage facilite ou empêche les déplacements d’un organisme entre les habitats, comprend la connectivité structurelle, c’est-à-dire l’arrangement spatial de l’habitat et des éléments paysagers, et la connectivité fonctionnelle, c’est-à-dire la réponse comportementale d’un organisme face à la structure du paysage et à la matrice paysagère (Taylor et al., 2006 ; Taylor et al., 1993). Ainsi, la modélisation de la connectivité paysagère dépend de la qualité de la cartographie utilisée (souvent l’occupation du sol) et de l’organisme étudié.
Une végétation urbaine mieux décelée par la télédétection et plus efficace dans l’estimation de la connectivité structurelle
Pour quantifier l’apport de notre approche, nous avons comparé des indices de composition et de configuration du paysage basés sur les végétations herbacée et arborée entre les trois cartographies à l’intérieur des emprises urbaines. En utilisant les cartographies « brutes », seulement 10 % environ de l’occupation du sol est associée à la végétation à l’intérieur des trois villes (figure 3. a). Ces cartographies « brutes » sous-estiment nettement la végétation urbaine puisque celle-ci atteint 40 % de l’occupation du sol dans les cartographies (VHRvm et VHRsvm) enrichies avec la végétation télédétectée (figure 3. a.). De plus, le nombre de taches de végétation est plus élevé sur les cartographies enrichies des produits issus de la télédétection, et ces taches sont globalement plus petites (figures 3. b. et c.). Ces résultats montrent que la végétation qui n’est pas présente dans les bases de données institutionnelles contient principalement des petites surfaces plus ou moins isolées telles que les jardins privés à l’intérieur des zones pavillonnaires. Ces espaces sont toutefois importants tant par leur surface occupée cumulée (Shahtahmassebi et al., 2021) que par leur importance pour maintenir une certaine biodiversité en milieu urbain (App et al., 2022 ; Mimet et al., 2020). Par ailleurs, des approches de télédétection aussi simples que l’utilisation du NDVI, au rendu similaire des cartographies VHRvm, permettent de détecter la végétation de manière fiable et rapide. La différenciation des strates reste néanmoins fondamentale pour l’estimation des services écosystémiques fournis pour déterminer, par exemple, le potentiel du stockage de carbone ou encore pour estimer la fonctionnalité des réseaux écologiques (Grafius et al., 2016 ; 2017).
Dans un contexte de ZAN, il semble alors important de considérer ces espaces verts urbains dans l’évaluation de l’artificialisation des sols, car ils occupent une part non négligeable des taches urbaines, la végétation urbaine occupant près de 40 % des trois villes étudiées ici.
Figure 3. Indices de connectivité structurelle focalisés sur la végétation herbacée et la végétation arborée
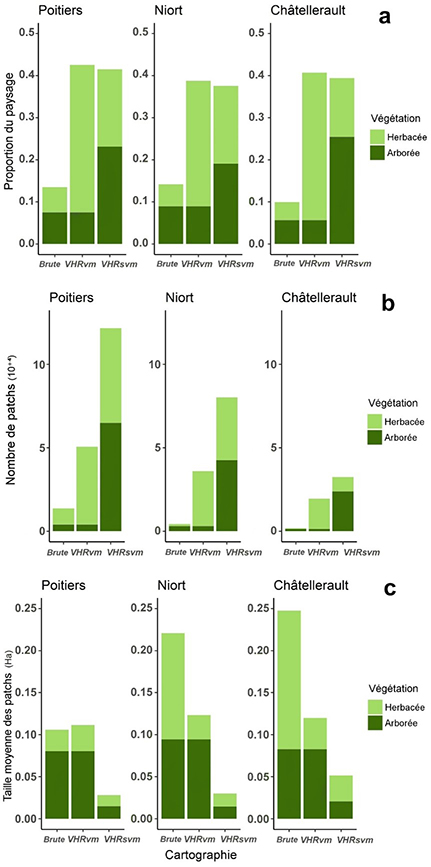
La proportion de chaque catégorie a été mesurée (a), ainsi que le nombre de taches (b) et la taille moyenne des taches (c).
Adapté de Morin, Herrault, Guinard, Grandjean& Bech, 2022.
Licence CC BY 4.0.
Des réseaux écologiques plus proches de la réalité
Figure 4. Comparaison de l'indice de probabilité de connectivité (PC) entre les cartographies (« brute », VHRvm, VHRsvm) pour différentes distances de dispersion
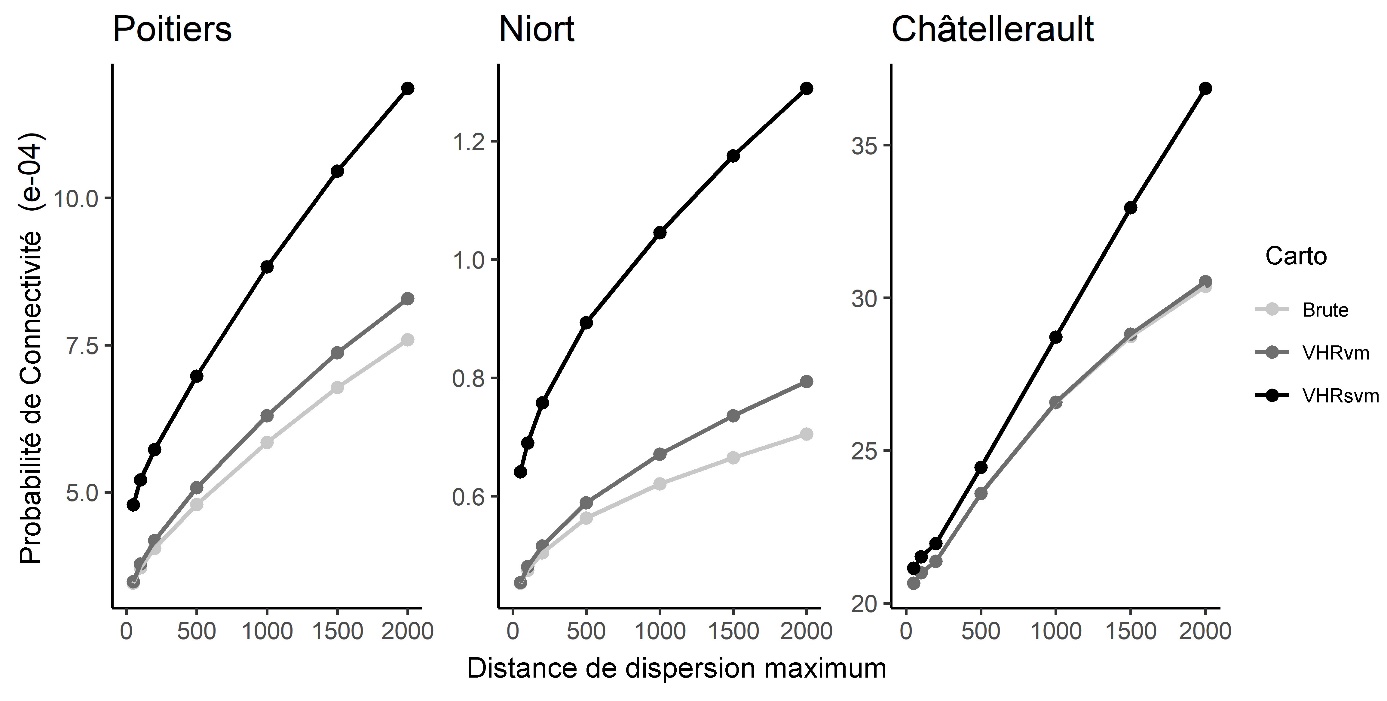
Adapté de Morin, Herrault, Guinard, Grandjean & Bech, 2022.
Licence CC BY 4.0.
En écologie du paysage, la modélisation des réseaux écologiques estimée via la connectivité fonctionnelle prend en compte non seulement le paysage, c’est-à-dire l’arrangement spatial de l’habitat favorable à une espèce avec les autres types d’occupation du sol, appelé aussi « matrice paysagère », mais également la réponse comportementale de l’organisme étudié face à chaque entité du paysage (Taylor et al., 2006 ; Taylor et al., 1993). Concrètement, des « valeurs de résistance » du paysage sont assignées à chaque structure paysagère. Ces valeurs caractérisent la difficulté des individus à traverser chaque élément, voire leur mortalité, allant du plus favorable élément, par exemple la forêt pour une espèce forestière, au plus défavorable comme une ligne à grande vitesse. Par ailleurs, il est important de renseigner la distance ou la capacité de dispersion, soit la distance qu’un organisme est capable de parcourir, pour mieux appréhender la fonctionnalité des corridors écologiques : un écureuil peut se déplacer sur plusieurs kilomètres alors qu’un cloporte ne peut parcourir que quelques dizaines voire centaines de mètres. Les occurrences des individus, c’est-à-dire leurs positions géographiques, permettent d’améliorer ces modélisations par une meilleure compréhension des espaces que l’espèce occupe. À partir de ces informations, les analyses cartographiques identifient les taches d’habitat favorables et les connexions effectives entre ces taches que sont les corridors écologiques. En milieu urbain, les parcs et zones forestières vont être considérés comme des habitats favorables pour certaines espèces inféodées au milieu forestier alors que les arbres isolés et les jardins privés vont plutôt jouer le rôle de corridors écologiques pour connecter plusieurs habitats. L’efficacité de ces corridors est estimée grâce aux valeurs de résistance du paysage et à la capacité de dispersion de l’espèce étudiée. Dans le cadre de cette étude, nous avons modélisé les réseaux écologiques attendus pour des espèces forestières (identification des taches d’habitat et des corridors fonctionnels) afin de tester l’impact de la résolution spatiale et de la précision de l’occupation du sol sur ces modélisations. Ainsi, pour chaque ville et cartographie, un indice de probabilité de connectivité (PC) a été calculé pour caractériser la disponibilité de l’habitat forestier à travers chaque zone d’étude (figure 4). Cet indice prend en compte la surface des taches d’habitat (ici la végétation arborée) et leurs connexions. Globalement, la PC est plus élevée pour les cartographies enrichies des végétations arborée et herbacée issues de la télédétection puisque la cartographie est plus précise. Ces valeurs plus élevées se traduisent par des taches d’habitat plus nombreuses mais également par l’identification d’un plus grand nombre de connexions fonctionnelles. Ces résultats montrent de manière attendue que la précision cartographique influence fortement les chemins des corridors modélisés mais également les indices de connectivité caractérisant leur importance au sein des réseaux écologiques modélisés. Il est intéressant de noter que les modélisations pour des organismes à moyenne dispersion (1 000 à 2 000 m) sont plus influencées par la précision cartographique (figure 4). Autrement dit, les cartographies de faible précision sous-estiment davantage la disponibilité de l’habitat pour ces organismes. Ces indices de connectivité peuvent être utilisés pour hiérarchiser et prioriser les actions dans les plans de conservation de la biodiversité (Duflot et al., 2018). Au-delà de l’influence de la précision cartographique sur les valeurs théoriques de connectivité au sein des réseaux écologiques, ces résultats laissent supposer que des représentations du territoire trop éloignées de la réalité pourraient mener à des conclusions erronées et à de fortes implications en termes de mesure de l’artificialisation et de politiques de conservation dans les plans d’aménagement du territoire.
Conclusion et perspectives
Dans une approche qui combine la télédétection à très haute résolution spatiale et l’écologie du paysage, nous avons développé une méthodologie, basée sur des données et des outils en libre accès et relativement rapide, capable de détecter les strates de la végétation en milieu urbain pour enrichir les bases de données institutionnelles. Cette approche permet de mieux appréhender l’occupation des sols ainsi que les réseaux écologiques et offre la possibilité de mieux comprendre l’impact du paysage urbain sur la biodiversité voire de tester l’impact de différents scénarios d’aménagement du territoire sur ces réseaux écologiques (Sahraoui et al., 2021). Au regard de cette journée d’étude et de l’objectif ZAN, il est clair qu’adopter une méthodologie standardisée et commune mesurant cette artificialisation permettrait de mieux appréhender les problématiques d’artificialisation des sols à l’échelle locale comme nationale. Il serait pertinent de reconsidérer la place de la végétation urbaine dans la quantification des surfaces artificialisées compte tenu des surfaces importantes qu’elle représente au sein des taches urbaines et des services qu’elle peut fournir aussi bien aux humains qu’à la biodiversité. La méthodologie proposée ici, bien que nécessitant des compétences certaines en sciences de l’information géographique, caractérise avec précision la végétation urbaine, information souvent lacunaire dans les bases de données existantes.
Au-delà d’estimer la qualité des réseaux écologiques actuels, cette méthode permet de tester plusieurs futurs scénarios d’aménagement. En d’autres termes, il est possible de prédire l’impact écologique de la création de nouveaux logements, ou quartiers, pour identifier les zones à préserver en priorité.